Isaac Sim
Isaac Sim이란
- 로봇 시뮬레이션 플랫폼
- 물리 엔진으로 NVIDIA PhysX를 사용하여 실제 물리 근사에 유리하다고 함(unity에 비해)
- 렌더링은 RTX 기반 실시간 레이트레이싱을 사용함. 따라서 GPU에 RT코어가 없으면 실행할 수 없다는 이야기가 있으니 확인할 것(ex. A100, H100)
- 소스가 많이 없고 최신 버전에 버그가 존재하는 것으로 알려져 있음
- ROS와의 연동이 가능
- USD포맷을 사용하며 URDF파일을 가져올 수 있음(내부적으로 파싱해서 USD변환하는 것으로 추정)
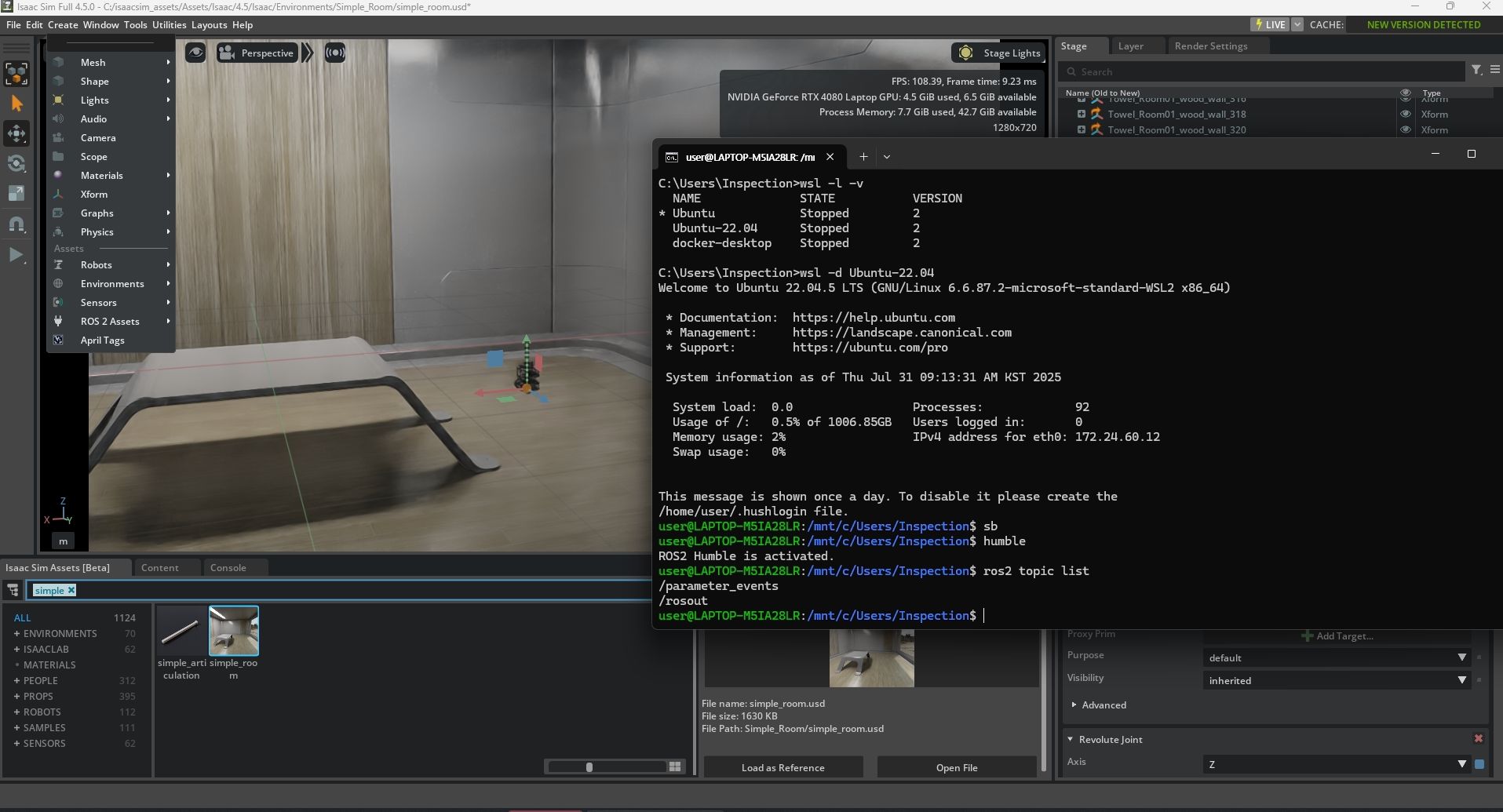
- ROS등 기타 환경과의 연동을 고려했을 때 제일 좋은 실행환경은 네이티브 리눅스 환경
- 윈도우에서는 로컬에 isaac sim을 설치하고 WSL에 ROS환경을 구축해야함 (WSL에는 isaac sim 설치 어려움, 도커로 하면 통신이 어려움)
USD란 무엇인가
https://openusd.org/docs/index.html
USD는 데이터를 계층적 네임스페이스에 해당하는 Prims (Primitive)로 구성함. Prim은 자식 prim외에도 Attributes, Relationships를 포함할 수 있으며, 이들을 합쳐서 Properties라고 함.
- Attirbutes: 시간에 따라 변할 수 있는 형식이 정해진 값 (key-value 형태)
- Relationships: 계층 내 다른객체로 향하는 multi-target “pointers”
USD는 참조 시 네임스페이가 변경될 경우 target remapping을 자동으로 처리
Isaac Sim 설치
https://docs.isaacsim.omniverse.nvidia.com/4.5.0/installation/download.html (2025.07기준)
참고하여 설치
Isaac Sim 실행 (windows)
- C:\issacsim에 설치되었다고 가정
- selector말고 다른 .bat파일 실행해도 가능함. selector는 GUI를 통해 실행 옵션을 정할 수 있음
- 실행에 시간이 어느정도 걸림
cd C:\issacsim
isaac-sim.selector.bat
ex.) 화면 좌측 play버튼을 누르면 중력이 적용됨
댓글남기기