ROS2-006. Turtlesim 04 - 액션
[그림] Action의 개념
- Action 서버를 구현하는 노드에 클라이언트 노드가 먼저 서비스를 목표로 요청(request)
- 서버가 응답(response)
- 목표(Goal)을 달성할때까지 중간을 토픽으로 피드백해줌(feedback topic)
- 끝나면 Result 서비스를 이용
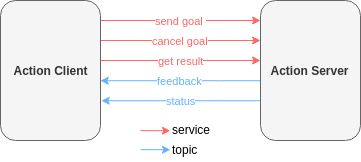
[그림] Action 구성 (간략)
1
2
# 터미널 1
ros2 run turtlesim turtlesim_node
1
2
# 터미널 2
ros2 run turtlesim turtle_teleop_key
키보드의 화살표로 움직일 수 있는 상태가 됨
1
2
# 터미널 3
ros2 action list
명령을 수행하면 /turtle1/rotate_absolute 라는 결과가 나오고 이 데이터 타입을 알려면 info 옵션을 사용하거나 ros2 action list -t를 통해 알 수 있다.
그 결과 turtlesim/action/RotateAbsoulte라는 데이터 타입을 사용함을 알 수 있다.
1
ros2 interface show turtlesim/action/RotateAbsoulte
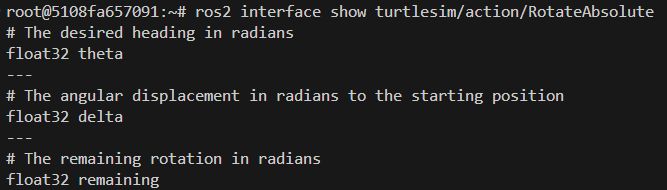
theta가 Goal (최종 각도), delta가 출발 위치에서 각도 차이, remaining이 남은 각도(feedback)에 해당한다.
ros2 action send_goal <action_name> <action_type> <values>
1
ros2 action send_goal /turtle1/rotate_absolute turtlesim/action/RotateAbsolute "{theta: 3.14}"

1
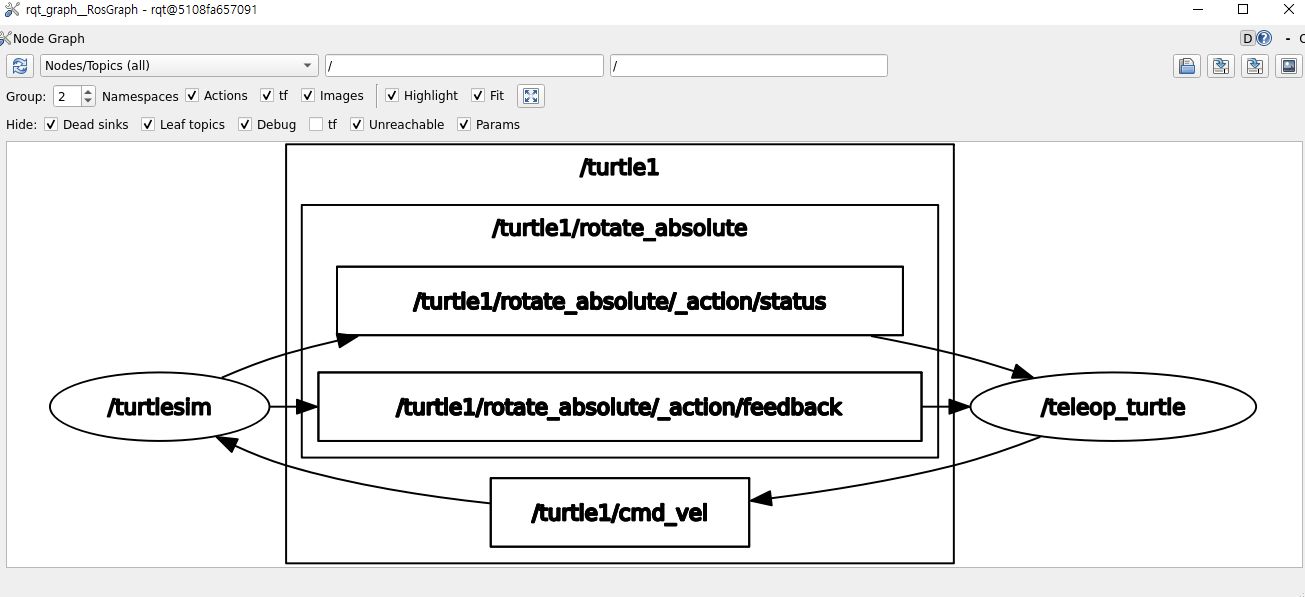
rqt_graph
댓글남기기